前面讲述的导航方式,无一例外都需要地面导航设备帮助,而GPS不但不需要地面导航设施,它的精度也比较高,我们自然要把它应用在飞行中。下面我们从KSEA机场的34号跑道起飞,到KSHN机场的23号跑道降落。讲解如何使用GPS导航。
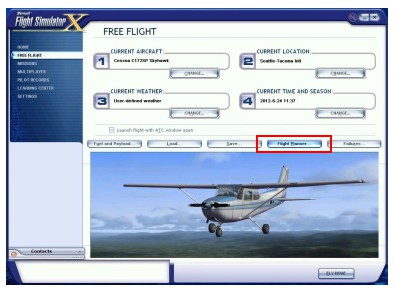 选择好机型后点击flight planner
选择好机型后点击flight planner
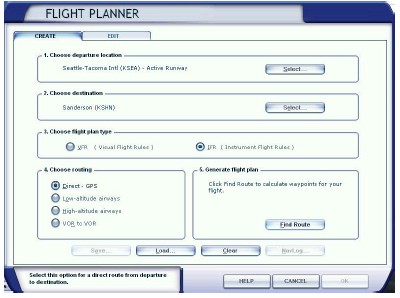
1. 出发机场KSEA的34R号跑道。
2. 到达机场KSHN。
3. 飞行方式是IFR(仪表导航)。
4. 导航方式为GPS。
5. 点击find route
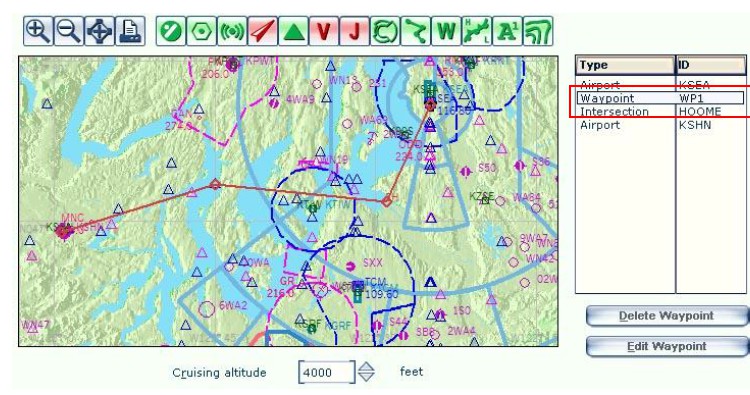
刚开始,两个机场的连线是直线,可以拖动它如上图。注意右边中间两项,就是改变路线后产生的航路点。其中Waypoi原由网nt WP1不是航图中的某个规定点,所以只需把它定在差不多的位置即可;Intersection HOOME是航图中规定的某个点,请务必把这个点定位得与图中一样。完成后,会提示你保存航路文件,文件可以保存在任何位置,请记住你保存文件的位置,后面会用到它。或者载入附带的文件:KSEA - KSHN.PLN,这是笔者设置的飞行计划,会得到与上图一致的结果。
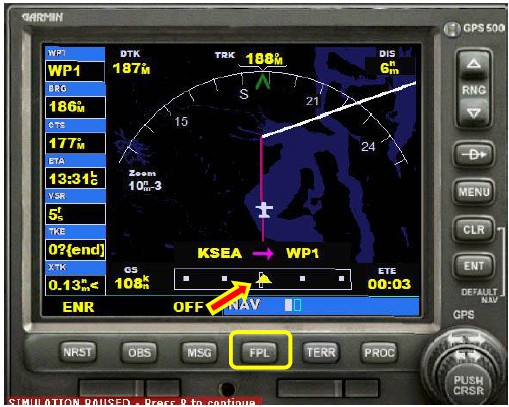
设置完毕回主界面开始游戏。进入游戏后检查是否停在34R跑道上。打开GPS界面。如下图:

进入跑道后,先让飞机开十几米再停下,因为刚开始GPS的一些读数可能不对。
1. DTK,飞向下一个航点的航向(无风的情况下)。
2. TRK,飞机的当前航向。
3. DIS,到下一个航路点的距离。
4. GS,地速。
5. ETE,到达下一个航路点的预计时间。
6. 当前处于哪一个航段上。KSEA→WP1,说明当前要从KSEA机场飞向WP1航路点,WP1航路点就是我们随意设置的那个点。下面黄色三角形上有一个白色的矩形方框,留意它,后面会讲到。
7. 放大、缩小地图。
8. 一键直飞。可以直飞某一个航图上的点或机场,后面再介绍。先不要按它,万一设置到什么东西,会与后面教程内容不一样。
9. 具体功能具体分析。
10. 不断地按,地图上的元素会循环增加或减少。
11. 回车确认。各个功能的确认键。长按可以退出某个功能。
12. 多功能选择旋钮,以下称“外左、外右、内左、内右”,“单击”按PUSH CRSR。在主界面时按可以循环显示GPS所有的功能。先不要按它。
13. 进近程序选择,很重要的功能,先不碰它。
14. 显示地景。
15. 飞行计划,显示所有的航路点。
16. 显示各种通知。
第一步:起飞,并保持直线上升到1000英尺。
第二步:到达1000英尺后,左转或者右转飞向WP1点。因为WP1点是随意设置的,所以航向不一定是187度。笔者的GPS的DTK显示的是187。
第三步PIrQNXWTCz:转向187后,可以观察到白色矩形框没有对正原由网黄色三角形,白色方框往哪边偏,GPS航道就在你的哪边。按情况飞到航道中间去。在无风的状态下,TRK航向与DTK航向是一致的。如下图,基本在正确的GPS航道上,处于第1航段,正飞向WP1。是否处于GPS航道上要以那个白色矩形框为准,而不是以那条红线为准。
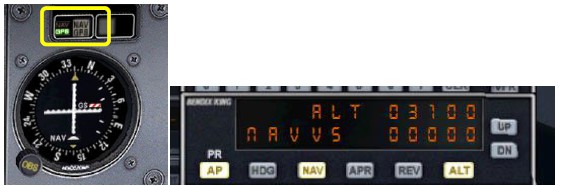
第四步:当处于第1航段时,可以进入自动驾驶。以172为例,先点击GPS导航方式按钮如下图,这样自动驾驶才会以GPS为标准(NAV导航方式是用于VOR的)。再打开无线电面板,先设置高度如图,我设置的是3100。然后分别点亮AP、NAV、ALT,AP是自动驾驶的总开关,NAV是接受GPS的控制(如果是VOR导航,则接受VOR的控制),ALT是自动高度,以设置的3100为准。
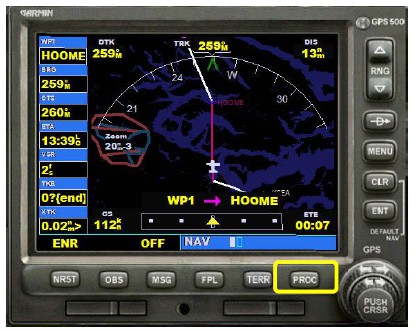
第五步:到达WP1点后飞机会自动转向第2个点如下图,从WP1飞向HOOME,此时点击PROC:
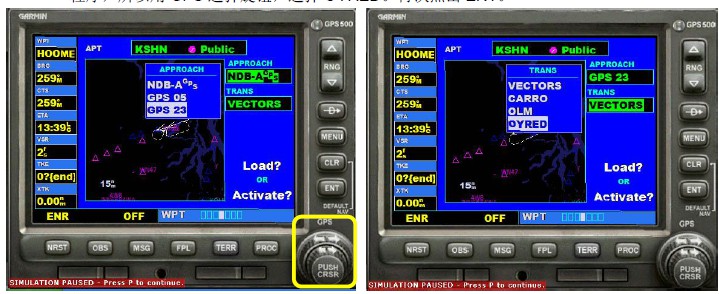
第六步:点击PROC后如下图,光标定位在Select Approach上,此时还未载入任何进近程序,所以光标无法移动到别处,再点击ENT:

第七步:拿出附带的文件:KSHN (GPS RWY 23).PDF,这份航图说明的是如何用GPS降落KSHN机场的23跑道(阅读航图方法前面有介绍)。点击GPS选择旋钮的“外右”或者“内右”,把光标移动到GPS 23,选择使用23号跑道PIrQNXWTCzGPS进近,再次点击ENT。光标跳到进近点选择,VECTORS表示直接飞向最终进近修正点,CARRO是复飞后盘旋所用的点,OLM是飞向一个VOR台,OYRED是飞向初始进近修正点,对照航图都能找到这些点。我决定从初始进近修正点开始进近程序,所以用GPS选择旋钮,选择OYRED。再次点击ENT。
第八步:光标会跳到Load,再次点击ENT后,载入设定好的进近程序,但不立即执行。如果把光标移到Activate,则载入进近程序并立即执行。由于飞机正在飞向HOOME点,如果立即执行则会跳过HOOME点直飞初始进近点。我们想让飞机飞到HOOME点再执行进近程序,所以先选择载入但不立即执行,选Load并按ENT。
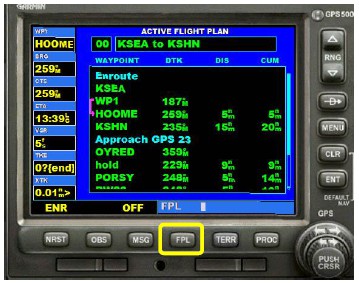
第九步:执行上一步后,会出现如下界面,这是飞行计划界面。图中WP1与HOOME之间有条红线,说明飞机正处于这两个点之间。按一次FPL回到主界面,再按一次可以重新进入。
第十步:现在回到主界面,看看离HOOME点还有多远,当距离HOOME点约1海里时,要执行进近程序了。由于前面载入的进近程序是从OYRED初始进近点开始的,所以执行后会自动飞向该点。
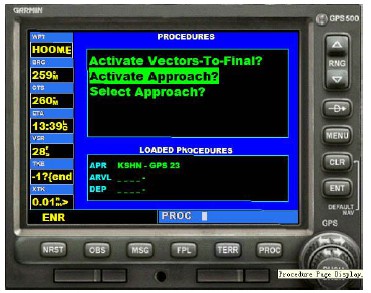
第十一步:由于先前载入的进近程序,所以点击PROC后会显示如下图,会发现光标可以移动了,按选择旋钮的外圈左右可以移动。移动到Activate Approach,点击ENT,然后飞机会自动飞向OYRED点。如果选择Activate Vectors-To-Final,会直接飞向最终进近点PORSY。这些点全部都能在航图中找到,OYRED点旁边注明IAF,说明它是“初始进近修正点”,正常情况下都从这里开始。而PORSY旁边注明FAF,说明它是“最终进近修正点”。Select Approach则是重新选择进近程序。
第十二步:激活进近程序后飞机就自动飞向初始进近点了。GPS如下图,正在飞向OYRED。图中白色实心线是近进路线,白色虚线是复飞路线。这些路线均与航图中的内容是一致的。

第十三步:达到OYRED点时,飞机会自动向右转做一个盘旋。如果激活的是Activate Vectors-To-Final的话,则不会做这个盘旋。
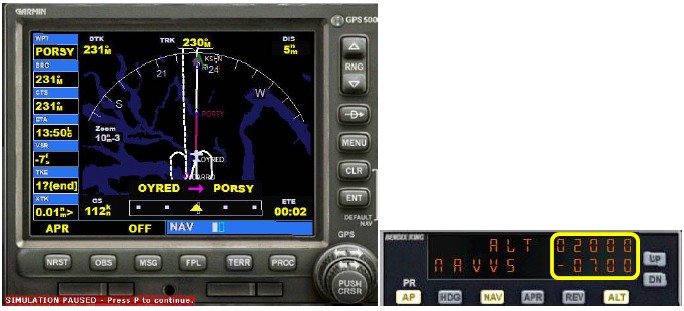
第十四步:完成了OYR//www.58yuanyou.comED点的盘旋以后,按照航图要求要开始下降到2000英尺了,到PORSY点高度2000。所以调整自动驾驶的高度如下图。
第十五步:过了PORSY点后按航图要求下降到最低下降高度860,自动高度不能设置860,只能设置900。不过这时最好转手动控制,同时在下降过程中要注意收油门,因为172没有自动油门,在下降过程中如果不收油门,速度会超的。切断自动驾驶的方法是点击AP按钮。最后的情况大致如下图

注:飞行计划的bug。很多人都问过,保存飞行计划后重新载入的内容没有航路。解决方法:用记事本打开你保存的飞行计划文件,把除第一行以外的所有?号都改成*号,保存后重新载入即可。