今天,正运动小助手为大家分享一下VB6.0开发总线初始化的运动控制应用。
我们主要从VB6.0的项目新建、函数库引用和PC函数使用方面讲起,最后通过项目实战——总线初始化例程讲解,来让大家熟悉它的项目开发。
在正式学习之前,我们先了解一下正运动技术的运动控制卡ECI2418和ECI2618。这两款产品分别是4轴,6轴运动控制卡。

ECI2418支持4轴脉冲输入与编码器反馈,板载24点输入,16点输出,2AD,2DA,支持手轮接口,其中特定输出口支持高速PWM控制。

ECI2618支持6轴脉冲输入与编码器反馈,板载24点输入,16点输出,2AD,2DA,支持手轮接口,其中特定输出口支持高速PWM控制。
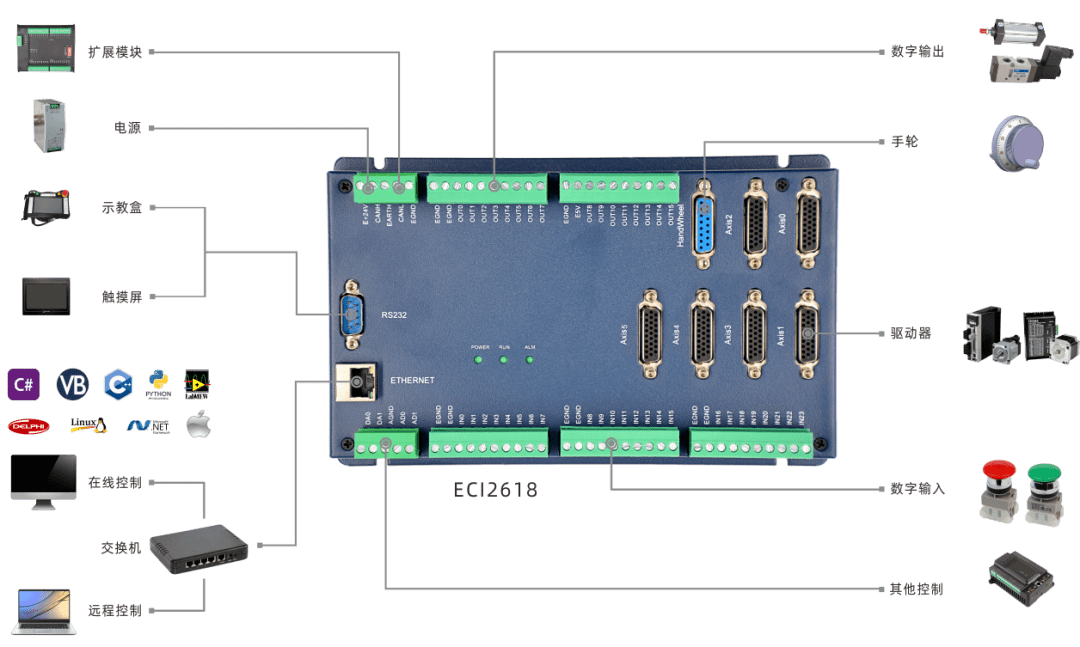
ECI2418,ECI2618均使用同一套API函数,均支持C、C++、C#、LabVIEW、Python、Delphi等开发语言,支持VC6.0、VB6.0、Qt、.Net等平台,支持Windows、Linux、WinCE、iMac等操作系统。
以下是VB6.0
开发流程
一
新建EXE工程,加载函数库。
(一)新建工程
打开Microsoft Visual Basic菜单,在“文件”→“新建工程”,选择新建“标准EXE”工程。
新建工程自带一个起始窗口,可以通过菜单“工程”→“属性”更改起始窗口。
(二)加载PC函数库
VB6.0需要对添加的dll文件进行加载,否则系统找不到函数所引用的函数库源,加载步骤如下。
1.找到厂家提供的光盘资料中的VB6.0资料。
2.将VB6.0压缩包解压,找到其中的dll库文件。


3.将dll文件zmotion.dll以及zauxdll.dll一起复制放入系统文件夹C:WindowsSystem32中。假如编程系统是64位系统,也要把上述文件复制到C:WindowsSysWOW64中。
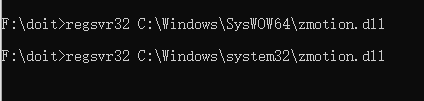
4.通过“开始”菜单→“Windows系统”→“命令提示符”或者在“开始”菜单搜索“cmd”打开命令提示符窗口,使用如下指令:
regsvr32命令用于注册COM组件,是Windows系统提供的用来向系统注册控件或者卸载控件的命令,以命令行方式运行。Zmotion.dll加载后,才可以调用zauxdll的函数。
可以将该条指令复制到记事本上,然后把txt文件另存为bat文件来运行。另外,一些自己下载vb6.0的额外部件也可以用该方法加载,加载后能在菜单“工程”→“引用”,“工程”→“部件”中找到对应文件,本例程使用函数库无需加载部件或原由网引用。
(三)函数库使用
将zauxdll.bas与工程文件放入同一文件夹,方便管理。
在工程资源管理器中右键添加模块,或者在菜单“工程”→“添加模块”功能中将zauxdll.bas添加入工程。

这样就做好使用正运动PC函数库的准备了。
二
查看PC函数手册,了解其用法。
(一)PC函数手册也在光盘资料里面。
具体路径如下:
(二)PC编程。
一般先根据控制器连接方式选择对应的连接函数连接控制器,返回控制器句柄。接着用返回的控制器句柄,实现对控制器的控制,大部分函数都有对控制器的指向。通常有:
控制器句柄是连接控制器的重要标志。
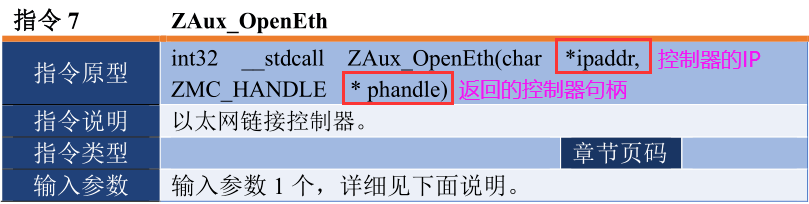
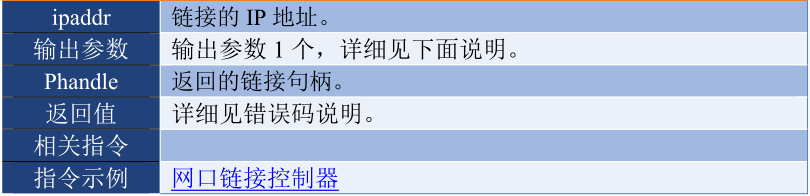
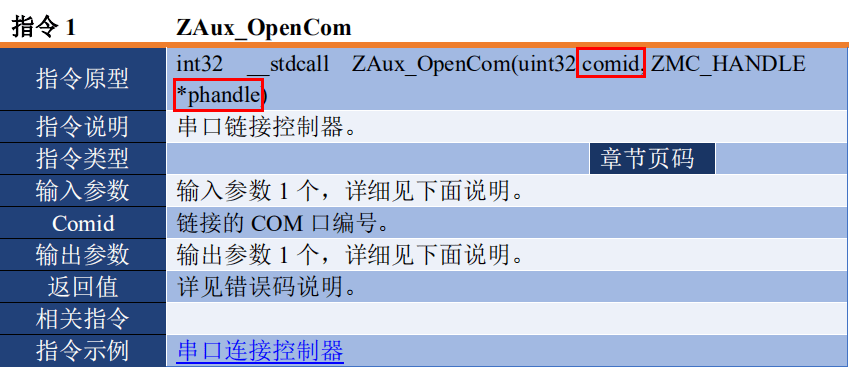
(三)通过网口连接控制器,获取句柄。
通过网口iret = ZAux_OpenEth(“127.0.0.1”, g_handle)或者串口iret = ZAux_OpenCom(1, g_handle)连接控制器,获取控制器句柄g_handle。
(四)下载总线初始化bas文件
下载总线初始化bas文件到控制器iret = ZAux_BasDown(g_handle, sFilePath, 1),sFilePath是对应总线初始化的文件地址,利用CommonDialog对话框操作部件,获取对象文件地址。
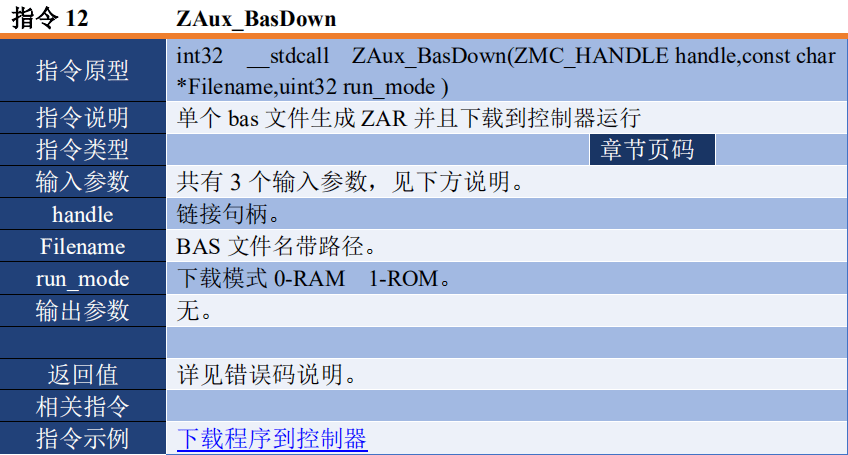
总线初始化文件是基于ZDevelop编写的EtherCAT和RTEX初始化程序,通过ZAux_BasDown方式下载到控制器以直接运行。


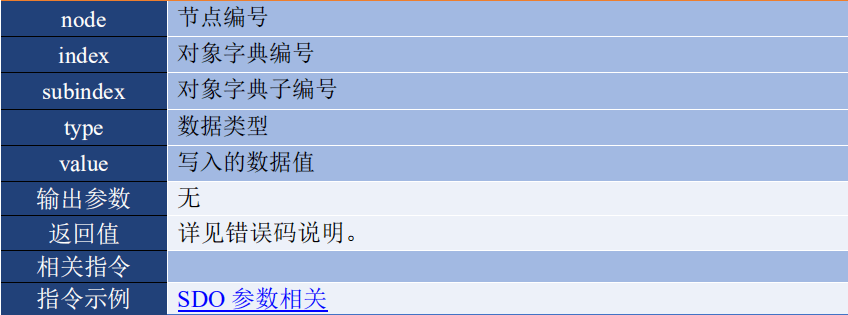
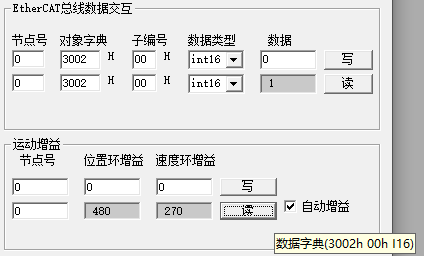
(五)EtherCAT数据字典读写
EtherCAT数据字典读写ZAux_BusCmd_SDORead和ZAux_BusCmd_SDOWrite。
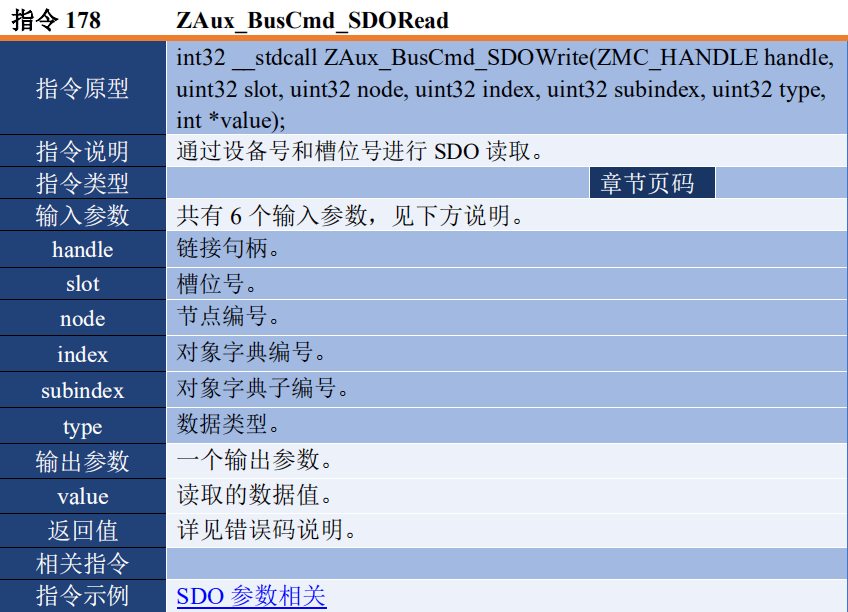
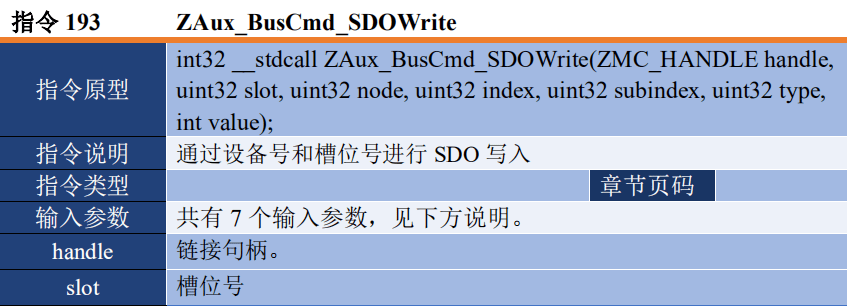
其中对象字典编号、对象字典子编号、数据类型是十进制输入,手册上是十六进制表示,使用时注意转换。
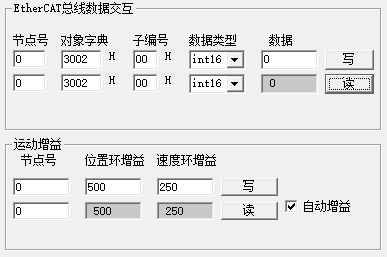
(六)位置环增益与速度环增益调整
松下A6B系列EtherCAT总线驱动器中:
位置环增益对应数据字典为3100H-00H(第一位置环增益)和3105H-00H(第二位置环增益);
速度环增益对应数据字典为3101H-00H(第一速度环增益)和3106H-00H(第二速度环增益);
自动选择增益参数的标志位为3002H-00H。
具体请参考光盘资料(P315~P318):技术资料→ECAT通讯规格篇→MINAS_A6B系列→EtherCAT通讯/选择类型。

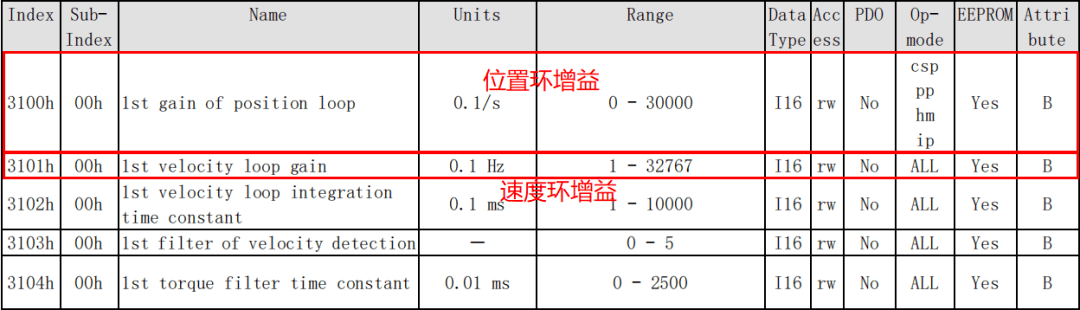
本篇文章使用第一位置环增益和第一速度环增益,通过实时自动增益调谐设置选择是否改变增益参数。
三
项目实战之连续插补运动例程讲解
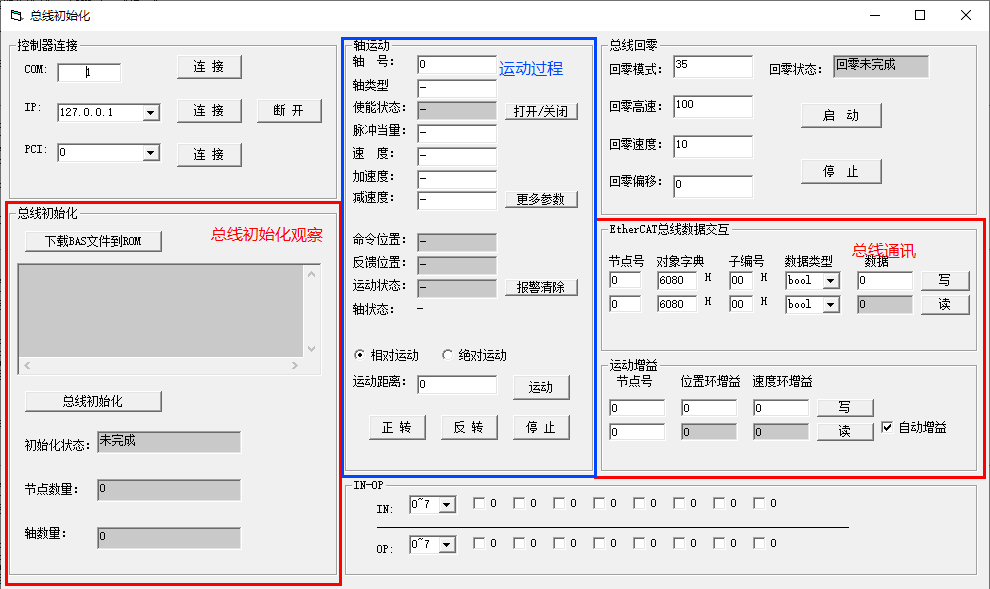
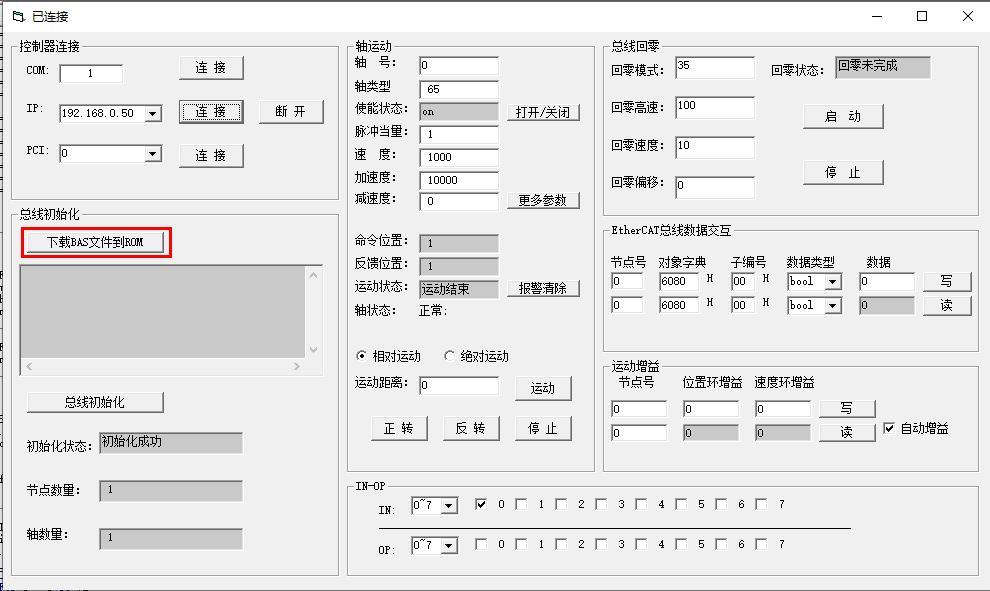
(一)界面讲解
(二)例程简易流程图
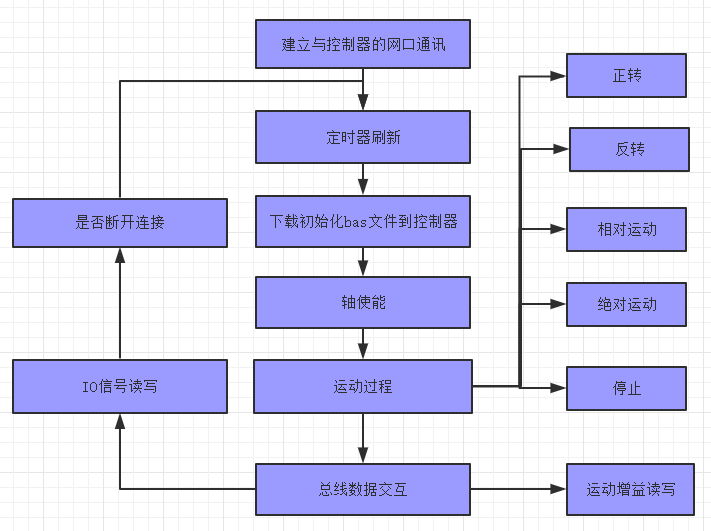
// 建立与控制器的网口通讯iret = ZAux_OpenEth(m_ipaddress, g_handle) '网口连接控制器
//定时器刷新ret = ZAux_Direct_GetAxisEnable(g_handle, m_axisnum, i_AxisPara(0))ret = ZAux_Direct_GetAxisStatus(g_handle, m_axisnum, i_AxisPara(1))……
//下载初始化bas文件到控制器iret = ZAux_BasDown(g_handle, sFilePath, 1) '下载到ROM
//轴使能iret = ZAux_Direct_SetAxisEnable(g_handle, m_axisnum, 0) ‘轴使能关闭 iret = ZAux_Direct_SetAxisEnable(g_handle, m_axisnum, 1) '轴使能打开
//正转iret = ZAux_Direct_Single_Vmove(g_handle, m_axisnum, 1)
//反转iret = ZAux_Direct_Single_Vmove(g_handle, m_axisnum, -1)
//相对运动iret = ZAux_Direct_Single_Move(g_handle, m_axisnum, Val(T_Move_s))
//绝对运动iret = ZAux_Direct_Single_MoveAbs(g_handle, m_axisnum, Val(T_Move_s))
//停止iret = ZAux_Direct_Single_Cancel(g_handle, m_axisnum, 2)
//运动增益读写iret =ZAux_BusCmd_SDORead(g_handle, 0, T_SdoNode, Val(CLng( "&H"& "3100")), 0, 3, m_sdo_data2_1) iret =ZAux_BusCmd_SDORead(g_handle, 0, T_SdoNode, Val(CLng( "&H"& "3101")), 0, 3, m_sdo_data2_2)
// IO信号读写iret = ZAux_Direct_GetIn(g_handle, i , IN_status)iret = ZAux_Direct_GetOp(g_handle, i , OP_status)iret = ZAux_Direct_SetOp(g_handle, i , OP_status)
(三)模块程序
1.初始化变量
2.控制器连接
Private Sub T_IpAddress_DropDown '下拉搜索IPDim Buffer As String * 10240T_IpAddress.ClearT_IpAddress.AddItem ("127.0.0.1")iret = ZAux_SearchEthlist(Buffer, 10230, 200) '搜索IP地址列表Dim Ip_List As StringIp_List = Split(Buffer, " ")For i = 0 To UBound(Ip_List)T_IpAddress.AddItem (Ip_List(i))NextEndSub
Private Sub T_OpenEth_Click '以太网连接Dim m_ipaddress As Stringm_ipaddress = T_IpAddress.TextIf g_handle <> 0 Then '断开前面的连接ZAux_Close (g_handle)g_handle = 0End Ifiret = ZAux_OpenEth(m_ipaddress, g_handle)'网口连接控制器If (g_handle <> 0) ThenForm1.Caption = "已连接"Timer1.Enabled = TrueT_AxisId_Changeiret = ZAux_Direct_GetUserVar(g_handle, "BUS_TYPE", Bus_type) '读取BAS文件中的变量判断是否有加载BAS文件If (iret = 0 And Bus_type <> -1) Theng_basflag = True'//文件已经加载End IfElseForm1.Caption = "未连接"MsgBox "控制器链接失败,请检测IP地址!", vbOKOnly, "警告"End IfEnd SubPrivate Sub T_PciId_DropDown '下拉搜索PCIDim m_maxpci As IntegerT_PciId.Clearm_maxpci = ZAux_GetMaxPciCardsFor i = 0 To m_maxpci - 1T_PciId.AddItem (i.ToString)NextEnd Sub
Private Sub T_OpenPci_ClickDim m_cardid As IntegerIf g_handle <> 0 Then '断开前面的连接ZAux_Close (g_handle)g_handle = 0End Ifm_cardid = Val(PCIADDRESS.Text)iret = ZAux_OpenPci(m_cardid, g_handle)'PCI方式连接If g_handle <> 0 ThenForm1.Caption = "已连接"Timer1.Enabled = TrueT_AxisId_ChangeDim ret As Integeriret = ZAux_Direct_GetUserVar(g_handle, "BUS_TYPE", Bus_type) '读取BAS文件中的变量判断是否有加载BAS文件If (iret = 0 And Bus_type <> -1) Theng_basflag = True'//文件已经加载End IfElseMsgBox "连接失败,请检查PCI", vbOKOnly, "提示"Form1.Caption = "未连接"End IfEnd Sub
Private Sub T_Close_Click'断开链接If (g_handle <> 0) ThenTimer1.Enabled = FalseZAux_Close (g_handle)g_handle = 0Form1.Caption = "未连接"End IfEndSub
3.总线初始化
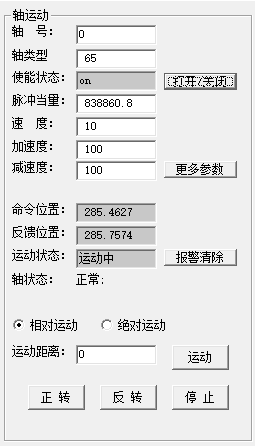
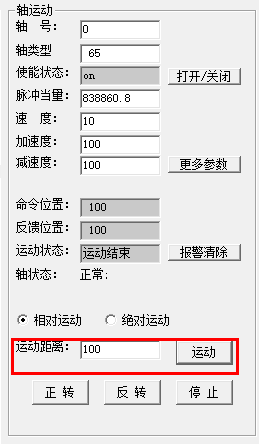
4.轴运动
Private Sub T_ClearAlm_Click '//清除轴报警If (g_handle = 0) ThenMsgBox "未链接到控制器!", vbOKOnly, "提示"Elseiret = ZAux_BusCmd_DriveClear(g_handle, m_axisnum, 0)End IfEnd Sub
Private Sub T_FwdMove_Click '正转If (g_handle = 0) ThenMsgBox "未链接到控制器!", vbOKOnly, "提示"Elseiret= ZAux_Direct_SetUnits(g_handle,m_axisnum,Val(T_Units.Text))iret= ZAux_Direct_SetSpeed(g_handle,m_axisnum,Val(T_Speed.Text))iret= ZAux_Direct_SetAccel(g_handle,m_axisnum,Val(T_Accel.Text))iret= ZAux_Direct_Single_Vmove(g_handle,m_axisnum,1)End IfEnd Sub
Private Sub T_RevMove_Click '反转If (g_handle = 0) ThenMsgBox "未链接到控制器!", vbOKOnly, "提示"Elseiret= ZAux_Direct_SetUnits(g_handle,m_axisnum,Val(T_Units.Text))iret= ZAux_Direct_SetSpeed(g_handle,m_axisnum,Val(T_Speed.Text))iret= ZAux_Direct_SetAccel(g_handle,m_axisnum,Val(T_Accel.Text))iret= ZAux_Direct_Single_Vmove(g_handle,m_axisnum,-1)End IfEnd Sub
Private Sub T_Move_Click '运动If (g_handle = 0) ThenMsgBox "未链接到控制器!", vbOKOnly, "提示"Elseiret= ZAux_Direct_SetUnits(g_handle,m_axisnum,Val(T_Units.Text))iret= ZAux_Direct_SetSpeed(g_handle,m_axisnum,Val(T_Speed.Text))iret= ZAux_Direct_SetAccel(g_handle,m_axisnum,Val(T_Accel.Text))If T_moveType(0).value = True Theniret= ZAux_Direct_Single_Move(g_handle, m_axisnum,Val(T_Move_s))ElseIf T_moveType(1).value = True Theniret= ZAux_Direct_Single_MoveAbs(g_handle,m_axisnum,Val(T_Move_s))End IfEnd IfEndSub
Private Sub T_Move_Click '运动If (g_handle = 0) ThenMsgBox "未链接到控制器!", vbOKOnly, "提示"Elseiret= ZAux_Direct_SetUnits(g_handle,m_axisnum,Val(T_Units.Text))iret= ZAux_Direct_SetSpeed(g_handle,m_axisnum,Val(T_Speed.Text))iret= ZAux_Direct_SetAccel(g_handle,m_axisnum,Val(T_Accel.Text))If T_moveType(0).value = True Theniret= ZAux_Direct_Single_Move(g_handle,m_axisnum, Val(T_Move_s))ElseIf T_moveType(1).value = True Theniret= ZAux_Direct_Single_MoveAbs(g_handle,m_axisnum,Val(T_Move_s))End IfEnd IfEndSub
Private Sub T_Stop_Click '停止If (g_handle = 0) ThenMsgBox "未链接到控制器!", vbOKOnly, "提示"Elseiret = ZAux_Direct_Single_Cancel(g_handle, m_axisnum, 2)End IfEndSub
5.总线回零
Private Sub T_StopHome_Click '停止T_Stop_ClickEndSub
6.总线数据交互
Private Sub T_EcatRead_Click 'ETHERCAT读取If (g_handle = 0) ThenMsgBox "未链接到控制器!", vbOKOnly, "提示"ElseIf (Bus_type = 0) ThenDim m_sdo_node1 As LongDim m_sdo_index1 As LongDim m_sdo_sub1 As LongDim m_sdo_type1 As LongDim m_sdo_data1 As Longm_sdo_node1 = Val(T_SdoNode1.Text)m_sdo_index1 = Val(T_SdoIndex1.Text)m_sdo_sub1 = Val(T_SdoSub1.Text)m_sdo_type1 = T_SdoType1.ListIndex + 1m_sdo_data1 = 0iret= ZAux_BusCmd_SDORead(g_handle,0, _m_sdo_node1, m_sdo_index1, m_sdo_sub1, m_sdo_type1, m_sdo_data1)If (iret <> 0) ThenMsgBox //www.58yuanyou.com"读取失败!", vbOKOnly, "提示"ElseT_SdoData1.Text = Str(m_sdo_data1)End IfElseMsgBox "非ETHERCAT模块!", vbOKOnly, "提示"End IfEnd IfEndSub
Private Sub auto_gain_check_Click '自动增益标志设置If (Bus_type = 0) ThenIf auto_gain_check.value = 0 Theniret= ZAux_BusCmd_SDOWrite(g_handle,0, Val(T_SdoNode2.Text), Val(CLng("&H" & "3002")), 0, 3, 0)Elseiret= ZAux_BusCmd_SDOWrite(g_handle, 0, Val(T_SdoNode2.Text), Val(CLng("&H" & "3002")), 0, 3, 1)End IfElseMsgBox "非ETHERCAT模块!", vbOKOnly, "提示"End IfEnd Sub
Private Sub T_ECAT_W_Click '速度环、位置环增益写If (g_handle = 0) ThenMsgBox "未链接到控制器!", vbOKOnly, "提示"ElseIf (Bus_type = 0) Theniret = ZAux_BusCmd_SDOWrite(g_handle,0, Val(T_SdoNode2.Text), Val(CLng("&H"&"3100")), 0, 3, Val(T_PostGain_W.Text)) '位置环增益写iret = iret + ZAux_BusCmd_SDOWrite(g_handle, 0, Val(T_SdoNode2.Text), Val(CLng("&H" & "3101")), 0, 3, Val(T_VeloGain_W.Text)) '速度环增益写If (iret <> 0) ThenMsgBox "写入失败!", vbOKOnly, "提示"End IfElseMsgBox "非ETHERCAT模块!", vbOKOnly, "提示"End IfEnd IfEnd Sub
Private Sub T_ECAT_R_Click '速度环、位置环增益读If (g_handle = 0) ThenMsgBox "未链接到控制器!", vbOKOnly, "提示"ElseIf (Bus_type = 0) Theniret = ZAux_BusCmd_SDORead(g_handle, 0, Val(T_SdoNode3.Text), Val(CLng("&H//www.58yuanyou.com" & "3100")), 0, 3, m_sdo_data2_1) '位置环增益读iret = iret + ZAux_BusCmd_SDORead(g_handle, 0, Val(T_SdoNode3.Text), Val(CLng("&H" & "3101")), 0, 3, m_sdo_data2_2) '速度环增益读If (iret <> 0) ThenMsgBox "写入失败!", vbOKOnly, "提示"ElseT_PostGain_R = Str(m_sdo_data2_1)T_VeloGain_R = Str(m_sdo_data2_2)End IfElseMsgBox "非ETHERCAT模块!", vbOKOnly, "提示"End IfEnd IfEndSub
7.IO口操作
Private Sub T_OP_Check_Click(Index As Integer) '输出口使能Dim OP_status As LongDim op_page As Longop_page = T_OP_page.ListIndexOP_status = T_OP_Check(Index).valueiret = ZAux_Direct_SetOp(g_handle, Index + op_page * 8, OP_status)EndSub
8.参数刷新
1)在主窗体
Private Sub Form_QueryUnload(Cancel As Integer, UnloadMode As Integer)End '关闭主窗体时关闭程序End Sub
Private Sub Form_Unload(Cancel As Integer)'断开链接If (g_handle <> 0) ThenTimer1.Enabled = FalseZAux_Close (g_handle)g_handle = 0End IfDim myForm As FormForEach myForm In FormsUnload myFormSet myForm = NothingPrivate Sub T_morePara_ClickForm2.ShowEndSub
Private Sub Timer1_TimerDim ret As LongDim f_AxisPara(10) As SingleDim i_AxisPara(10) As LongIf g_handle <> 0 Thenret = 0m_axisnum = Val(T_AxisId.Text)ret = ZAux_Direct_GetAxisEnable(g_handle, m_axisnum, i_AxisPara(0))ret = ret + ZAux_Direct_GetMpos(g_handle, m_axisnum, f_AxisPara(0))ret = ret + ZAux_Direct_GetDpos(g_handle, m_axisnum, f_AxisPara(1))ret = ret + ZAux_Direct_GetAxisStatus(g_handle, m_axisnum, i_AxisPara(1))ret = ret + ZAux_Direct_GetIfIdle(g_handle, m_axisnum, i_AxisPara(2))If (ret = 0) ThenIf i_AxisPara(0) = 0 ThenT_EnableStatus.Text = "off"ElseT_EnableStatus.Text = "on"End IfT_Dpos.Text = Str(f_AxisPara(0))T_Mpos.Text = Str(f_AxisPara(1))Call re_transfro(i_AxisPara(1), i_AxisPara(2))End IfIf (((i_AxisPara(1) And 64) = 64) And (if_home = False)) Then '//第6位是否被置1T_HomeStatus.Text = "回零中"if_home = TrueElseIf ((i_AxisPara(1) = 0) And if_home) ThenDim homestatus As Longhomestatus = 0ret = ZAux_BusCmd_GetHomeStatus(g_handle, m_axisnum, homestatus)If homestatus = 1 ThenT_HomeStatus.Text = "回零完成"ElseT_HomeStatus.Text = "回零未完成"End Ifif_home = FalseEndIf
If (g_basflag And g_InitStatus = -1) Then '//已经加载文件并且正在初始化 读取状态Dim tempstatus As SingleDim m_BusNodeNum As LongDim m_BusAxisNum As Singletempstatus = -1m_BusNodeNum = 0m_BusAxisNum= 0
ret = ZAux_Direct_GetUserVar(g_handle, "BUS_TYPE", Bus_type) '//读取BAS文件中的变量判断总线类型ret = ret + ZAux_Direct_GetUserVar(g_handle, "Bus_InitStatus", tempstatus) '//读取BAS文件中的变量判断总线初始化完成状态ret = ret + ZAux_BusCmd_GetNodeNum(g_handle, 0, m_BusNodeNum) '//读取槽位0上节点个数。ret = ret + ZAux_Direct_GetUserVar(g_handle, "Bus_TotalAxisnum", m_BusAxisNum) '//读取BAS文件中的变量判断扫描的总轴数g_InitStatus = tempstatus'//初始化完成刷新状态If (ret = 0 And g_InitStatus <> -1) Then If g_InitStatus = 1 ThenT_BusStatus.Text = "初始化成功"ElseT_BusStatus.Text = "初始化失败"End IfT_NodeNum.Text = Str(m_BusNodeNum)T_AxisNum.Text = Str(m_BusAxisNum)End IfEnd IfCall IN_OP_readEnd IfEndSub
Sub re_transfro(axisStatues, axisIdle)Dim axisStatues_str As StringDim axisIdle_str As StringaxisStatues_str = ""If axisStatues = 0 ThenaxisStatues_str = "正常;"ElseDim quo As LongDim mod_tr(24) As LongDim i As Longquo = axisStatuesFor i = 0 To 23mod_tr(i) = quo Mod 2quo = quo 2NextIf mowww.58yuanyou.comd_tr(1) Then axisStatues_str = axisStatues_str + "随动误差超限告警;"If mod_tr(2) Then axisStatues_str = axisStatues_str + "与远程通讯出错;"If mod_tr(3) Then axisStatues_str = axisStatues_str + "远程驱动器报错;"If mod_tr(4) Then axisStatues_str = axisStatues_str + "正向硬限位;"If mod_tr(5) Then axisStatues_str = axisStatues_str + "反向硬限位;"If mod_tr(6) Then axisStatues_str = axisStatues_str + "找原点;"If mod_tr(7) Then axisStatues_str = axisStatues_str + "hold速度保持信号输入;"If mod_tr(8) Then axisStatues_str = axisStatues_str + "随动误差超限出错;"If mod_tr(9) Then axisStatues_str = axisStatues_str + "超过正向软限位;"If mod_tr(10) Then axisStatues_str = axisStatues_str + "超过负向软限位;"If mod_tr(11) Then axisStatues_str = axisStatues_str + "CANCEL执行中;"If mod_tr(12) Then axisStatues_str = axisStatues_str + "脉冲频率超过最大速度;"If mod_tr(14) Then axisStatues_str = axisStatues_str + "机械手指令坐标错误;"If mod_tr(18) Then axisStatues_str = axisStatues_str + "电源异常;"If mod_tr(21) Then axisStatues_str = axisStatues_str + "运动中触发特殊运动指令失败;"If mod_tr(22) Then axisStatues_str = axisStatues_str + "告警信号输入;"If mod_tr(23) Then axisStatues_str = axisStatues_str + "轴进入暂停状态;"End IfIf axisIdle = 0 ThenaxisIdle_str = "运动中"ElseaxisIdle_str = "运动结束"End IfT_AxisStatus.Caption = axisStatues_strT_Idle.Text = axisIdle_strEndSub
Private Sub T_AxisId_Change '修改轴参数If (g_handle = 0) ThenMsgBox "未链接到控制器!", vbOKOnly, "提示"ElseDim f_AxisPara(10) As SingleDim m_atype As Longm_atype = 0m_axisnum = Val(T_AxisId.Text)iret = ZAux_Direct_GetUnits(g_handle, m_axisnum, f_AxisPara(0))iret = iret + ZAux_Direct_GetSpeed(g_handle, m_axisnum, f_AxisPara(1))iret = iret + ZAux_Direct_GetAccel(g_handle, m_axisnum, f_AxisPara(2))iret = iret + ZAux_Direct_GetDecel(g_handle, m_axisnum, f_AxisPara(3))iret = iret + ZAux_Direct_GetAtype(g_handle, m_axisnum, m_atype)If (iret = 0) ThenT_Atype.Text = Str(m_atype)T_Units.Text = Str(f_AxisPara(0))T_Speed.Text = Str(f_AxisPara(1))T_Accel.Text = Str(f_AxisPara(2))T_Decel.Text = Str(f_AxisPara(3))End IfEnd IfEndSub
2)在子窗体
Public Sub para_reset '写入参数Dim ret As Longret = 0d_AxisNum = Val(S_Axisnum.Text)g_handle = Form1.g_handleIf (g_handle <> 0) ThenDim iFor i = 0 To 72d_AxisPara(i) = Val(S_Axispara(i))Nextret = ZAux_Direct_SetAtype(g_handle, d_AxisNum, d_AxisPara(0))ret = ZAux_Direct_SetUnits(g_handle, d_AxisNum, d_AxisPara(1))ret = ZAux_Direct_SetAccel(g_handle, d_AxisNum, d_AxisPara(2))ret = ZAux_Direct_SetDecel(g_handle, d_AxisNum, d_AxisPara(3))ret = ZAux_Direct_SetSpeed(g_handle, d_AxisNum, d_AxisPara(4))ret = ZAux_Direct_SetCreep(g_handle, d_AxisNum, d_AxisPara(5))ret = ZAux_Direct_SetLspeed(g_handle, d_AxisNum, d_AxisPara(6))ret = ZAux_Direct_SetMerge(g_handle, d_AxisNum, d_AxisPara(7))ret = ZAux_Direct_SetSramp(g_handle, d_AxisNum, d_AxisPara(8))ret = ZAux_Direct_SetDpos(g_handle, d_AxisNum, d_AxisPara(9))ret = ZAux_Direct_SetMpos(g_handle, d_AxisNum, d_AxisPara(10))ret = ZAux_Direct_SetFsLimit(g_handle, d_AxisNum, d_AxisPara(12))ret = ZAux_Direct_SetRsLimit(g_handle, d_AxisNum, d_AxisPara(13))ret = ZAux_Direct_SetDatumIn(g_handle, d_AxisNum, d_AxisPara(14))ret = ZAux_Direct_SetFwdIn(g_handle, d_AxisNum, d_AxisPara(15))ret = ZAux_Direct_SetRevIn(g_handle, d_AxisNum, d_AxisPara(16))ret = ZAux_Direct_SetMovemark(g_handle, d_AxisNum, d_AxisPara(26))ret = ZAux_Direct_SetAxisAddress(g_handle, d_AxisNum, d_AxisPara(30))ret = ZAux_Direct_SetAxisEnable(g_handle, d_AxisNum, d_AxisPara(31))ret = ZAux_Direct_SetForceSpeed(g_handle, d_AxisNum, d_AxisPara(32))ret = ZAux_Direct_SetStartMoveSpeed(g_handle, d_AxisNum, d_AxisPara(33))ret = ZAux_Direct_SetEndMoveSpeed(g_handle, d_AxisNum, d_AxisPara(34))ret = ZAux_Direct_SetFastDec(g_handle, d_AxisNum, d_AxisPara(35))ret = ZAux_Direct_SetCornerMode(g_handle, d_AxisNum, d_AxisPara(38))ret = ZAux_Direct_SetDecelAngle(g_handle, d_AxisNum, d_AxisPara(39))ret = ZAux_Direct_SetStopAngle(g_handle, d_AxisNum, d_AxisPara(40))ret = ZAux_Direct_SetFullSpRadius(g_handle, d_AxisNum, d_AxisPara(41))ret = ZAux_Direct_SetZsmooth(g_handle, d_AxisNum, d_AxisPara(43))ret = ZAux_Direct_SetHomeWait(g_handle, d_AxisNum, d_AxisPara(46))ret = ZAux_Direct_SetFastJog(g_handle, d_AxisNum, d_AxisPara(47))ret = ZAux_Direct_SetFwdJog(g_handle, d_AxisNum, d_AxisPara(48))ret = ZAux_Direct_SetRevJog(g_handle, d_AxisNum, d_AxisPara(49))ret = ZAux_Direct_SetJogSpeed(g_handle, d_AxisNum, d_AxisPara(50))ret = ZAux_Direct_SetFholdIn(g_handle, d_AxisNum, d_AxisPara(51))ret = ZAux_Direct_SetFhspeed(g_handle, d_AxisNum, d_AxisPara(52))ret = ZAux_Direct_SetAlmIn( g_handle, d_AxisNum, d_AxisPara(65))ret = ZAux_Direct_SetRepOption(g_handle, d_AxisNum, d_AxisPara(66))
ret = ZAux_Direct_SetRepDist(g_handle, d_AxisNum, d_AxisPara(67))ret = ZAux_Direct_SetInvertStep(原由网g_handle, d_AxisNum, d_AxisPara(68))ret = ZAux_Direct_SetMaxSpeed(g_handle, d_AxisNum, d_AxisPara(69))ret = ZAux_Direct_SetDAC(g_handle, d_AxisNum, d_AxisPara(71))ret = ZAux_Direct_SetErrormask(g_handle, d_AxisNum, d_AxisPara(72))End IfEnd Sub
Private Sub Form_LoadS_Axisnum.Text = Form1.T_AxisId.TextS_reflash.value = 1Timer1.Enabled = TrueEnd Sub
Private Sub Form_Unload(Cancel As Integer)Timer1.Enabled = FalseEnd Sub
Private Sub S_Setpara_ClickIf Form1.g_handle = 0 ThenMsgBox "未链接到控制器!", vbOKOnly, "提示"ElseCall para_resetS_reflash.value = 1End IfEnd Sub
Private Sub Timer1_Timer'刷新Dim iIf Form1.g_handle <> 0 And S_reflash.value = 1 ThenCall para_reflashFor i = 0 To 72S_Axispara(i).Text = Str(d_AxisPara(i))NextElseFor i = 0 To 72S_Axispara(i).Text = "*"NextEnd IfEnd Sub
Private Sub S_Axispara_Click(Index As Integer) '准备改参数时停止刷新S_reflash.value = 0End Sub
(四)编译运行演示
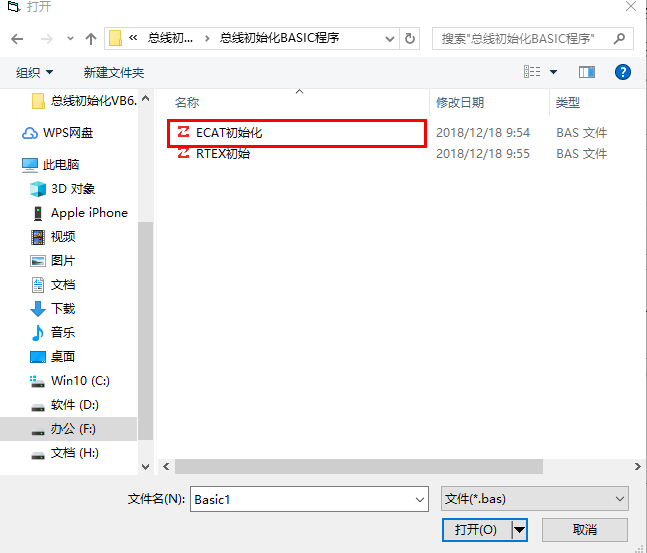
1.EtherCAT连接
连接控制器后点击“下载BAS文件到ROW”按钮,打开对应文件夹,选择“ECAT初始化”文件。
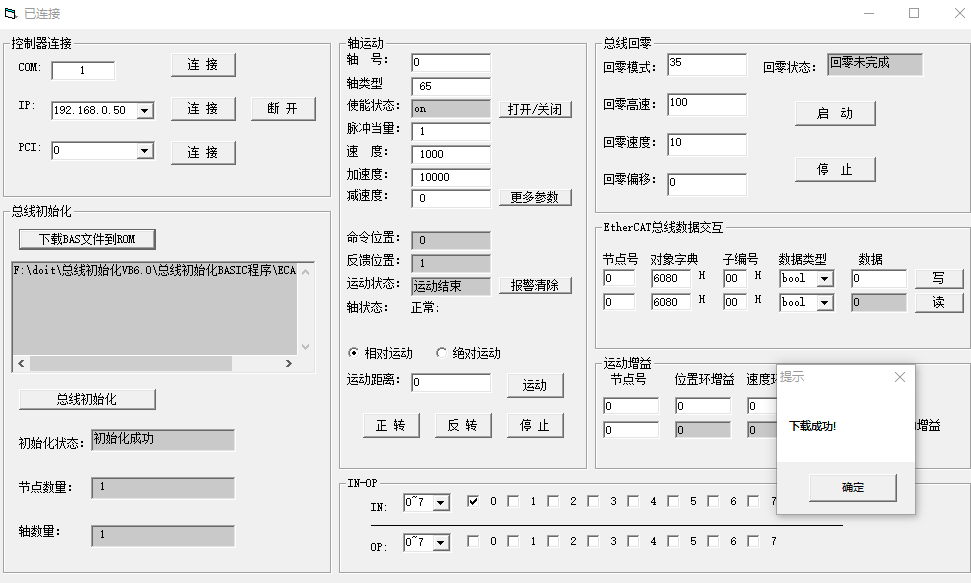
通过轴数量和节点数量可以看出,以及检测到驱动器并连接成功,接下来通过控制运动现象来确认驱动器受控制。
2.测试使能
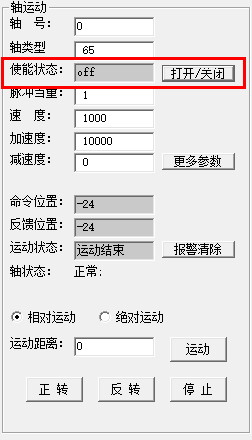
使能状态off
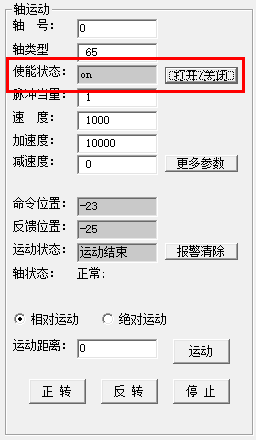
使能状态on
轴使能正常。
3.运动测试
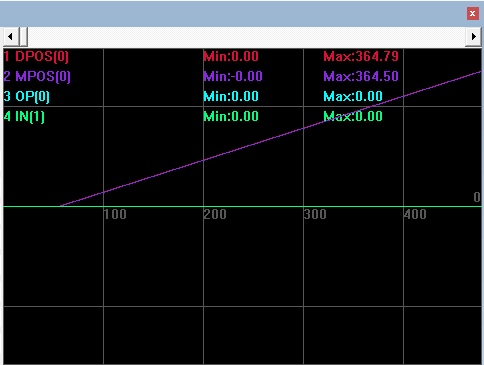
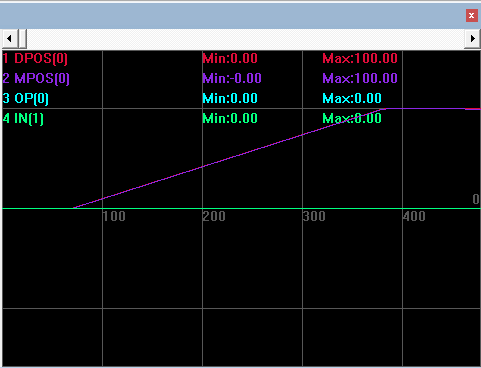
通过ZDevelop软件连接对应控制器时,可以通过“视图”→“示波器”调出示波器观察。
正反转运动:
定点运动:
4.数字字典测试
在EtherCAT通讯中,数据字典3002h-00h表示运动控制中位置环增益和速度环增益是否自动改变。1-自动,0-手动。
本次,正运动技术的VB6.0 应用开发就分享到这里,更多精彩内容请关注“正运动小助手”公众号。
本文由正运动小助手原创,欢迎大家转载,共同学习,一起提高中国智能制造水平。文章版权归正运动技术所有,如有转载请注明文章来源。
关于正运动技术
正运动技术是一家专注于运动控制技术研发与应用的国家级高新技术企业,主要从事运动控制器、运动控制卡、IO扩展模块、运动显控一体机等系列产品的研发、生产、销售和服务。
公司汇集了来自华为、中兴等公司的优秀人才,在坚持自主创新的同时,积极联合各大高校致力于运动控制技术研究与应用,是国内工控领域发展最快的企业之一,也是国内完整掌握运动控制核心技术和实时工控软件平台技术的企业。